3D Modeling of Building Interiors with a Human-Operated Backpack System
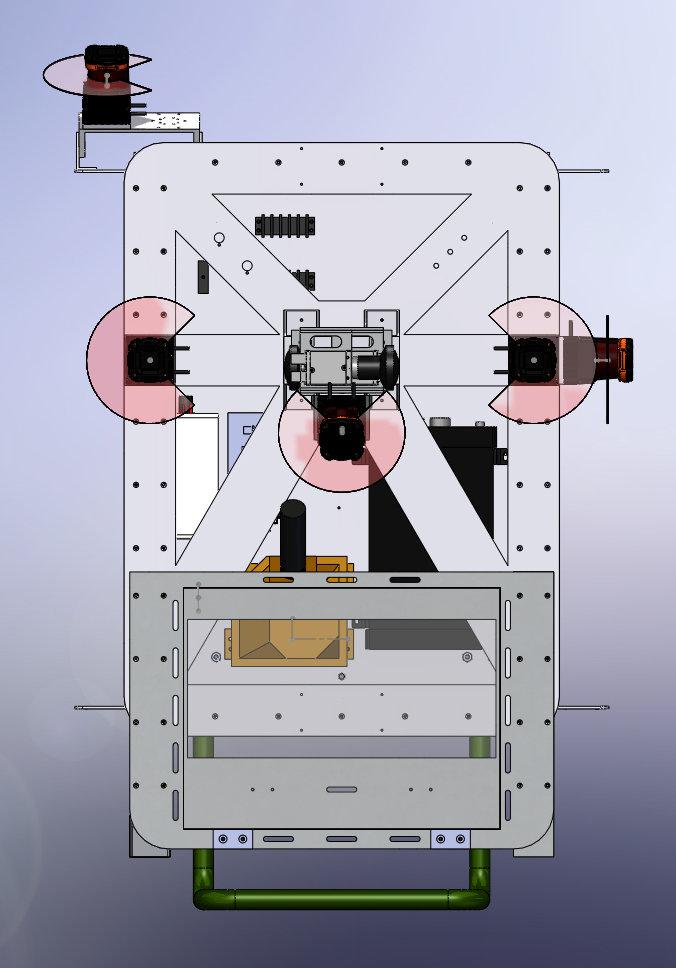
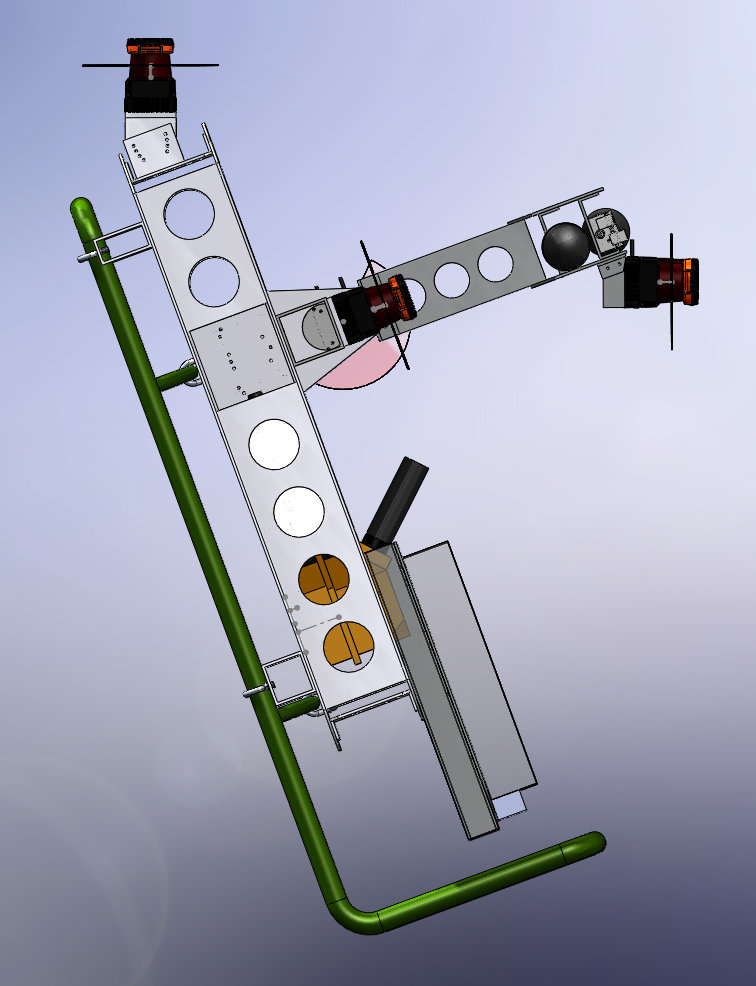
This project uses a human-borne backpack sensor system consisting of multiple laser scanners, cameras, and inertial measurment units which can reconstruct textured, 3D models of building interiors without external navigation references. I was the hardware lead on this project in the Video and Image Processing Lab. I designed and built this backpack system from the ground up and am responsible for the data collection software. In addition, I collaborate with members of the lab in developing the localization algorithms.
My colleagues and I have published papers on various aspects of this project:
- J. Kua, N. Corso, A. Zakhor, "Automatic Loop Closure Detection Using Multiple Cameras for 3D Indoor Localization," IS&T/SPIE Electronic Imaging 2012, Burlingame, California, January 22-26, 2012. [Adobe PDF]
- T. Liu, G. Chen, J. Kua, A. Zakhor, "Indoor Localization and Visualization Using a Human-Operated Backpack System," International Conference on Indoor Positioning and Indoor Navigation 2010, Zurich, Switzerland, September, 2010. [Adobe PDF]
- G. Chen, J. Kua, S. Shum, N. Naikal, M. Carlberg, and A. Zakhor. "Indoor Localization Algorithms for a Human-Operated Backpack System," 3D Data Processing, Visualization, and Transmission 2010, Paris, France, May 2010. [Adobe PDF]
- N. Naikal, J. Kua, G. Chen, and A. Zakhor. "Image Augmented Laser Scan Matching for Indoor Dead Reckoning," IEEE/RSJ International Conference on Intelligent RObots and Systems (IROS), St. Louis, MO, October 2009. [Adobe PDF]
The project was profiled on ABC 7 KGO news (San Francisco Bay Area) as well as the Daily Californian and various tech blogs on the Internet.
- ABC 7 KGO - Laser backpack creates instant 3D models, reported by Richard Hart, August 8, 2010.
- Daily Californian - New Backpack Makes 3D Maps of Buildings, reported by Matt Burris, August 12, 2010.
- Engadget - Laser backpack creates instant 3D maps, Venkman reminds you to not cross the streams, reported by Tim Stevens, August 11, 2010.
- Gizmodo - Laser Backpack Creates Instant Virtual Interiors, reported by Sam Biddle, August 11, 2010.
- PC World - 3D-Mapping Laser Backpack is the Nerdiest Back-to-School Item Ever, reported by Nick Mediati, August 11, 2010.
- Popular Science - Laser-Scanning Backpack Creates Instant 3-D Maps of Building Interiors, Everywhere You Go, reported by Clay Dillow, August 11, 2010.
- Air Force News - Portable Laser Backpack Revolutionizes 3D Mapping, reported by Maria Callier, September 7, 2010.
- United Press International - Laser backpack measures interiors, September 8, 2010.
- CNET - Military backpack maps out 3D interiors, reported by Tim Hornyak, September 9, 2010.
- Slashdot - A Portable Laser Backpack For 3D Mapping, September 18, 2010.
- SIGNAL Magazine - Laser Backpack Prototype Maps Inside Buildings, reported by George I. Seffers, September 30, 2010.
- North Gate Radio (KALX) - Laser Backpack: One-on-One with Avideh Zakhor, interview with Alexa Vaughn, October 7, 2010.
- Photonics Spectra - 3-D Interior Modeling: A Virtual Walk on the Inside, January 2011.
- Chevrolet Cruze-arati Video Segment - Veronica Belmont Tests Laser Backpack at UC Berkeley, April 22, 2011.
- GeoDataPoint - A Backpack for BIM, reported by Christine Grahl, August 29, 2012.
As an offshoot of this project, I developed a smaller version of this system for a rover platform which processed the sensor data online, performing localization, point cloud reconstruction, and plane fitting. This was developed for the Army Research Lab.
More information can be found on the project webpage.